

It's a long way from his native Bangladesh to La Jolla, California, where Ph.D. candidate Tariq Iqbal mounted the final defense of his dissertation in the field of robotics on June 8. Iqbal followed his advisor, professor Laurel Riek, from the University of Notre Dame to UC San Diego in 2016, and Riek chaired Iqbal's doctoral committee, including fellow CSE professors Manmohan Chandraker, Henrik Christensen, Ryan Kastner and Cognitive Science professor Andrea Chiba.
Iqbal's research revolves around the core idea of fluent human-robot interaction in real-world scenarios, and Iqbal's dissertation is titled "Coordination Dynamics in Human-Robot Teams." "Robots need to understand the humans they're interacting with," said Iqbal during the 2016 Contextual Robotics Forum organized by the Jacobs School of Engineering. "We started by looking at how humans do it, and boiled the algorithm down to three parts -- perception, anticipation and adaptation."
To enable robots to understand team dynamics, Iqbal says those three parts represent a "new, non-linear method to detect group synchronization [taking] multiple types of discrete, task-level events into consideration." Subsequently, he designed a new method for robots to perceive group behavior in real time and anticipate future actions. "I validated this approach within a human-robot interaction scenario, where a robot successfully and contingently coordinated with people in real time," notes Iqbal in his dissertation abstract. "We found that robots perform better when they have an understanding of team dynamics than when they do not."
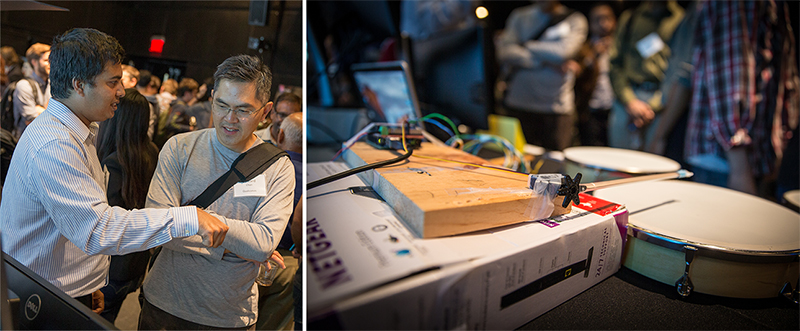
experimental drumming setup he used (right) to demonstrate
techniques for coordinating human and robotic interaction.
[Photos by Alex Matthews/Qualcomm Institute]
Iqbal also designed and implemented algorithms for robots to coordinate with people in a tempo-changing environment, which he tested in a drumming scenario where both humans and robots were drumming. Also at the 2016 robotics forum, Iqbal demonstrated a Kinect sensor detecting several people’s hand motions while they were pounding on a drum, and a robot drummed back, adapting in real time to changes in tempo and rhythm. While the test proved that robots could achieve human-level performance by combining anticipatory knowledge, a robot can be even better than people in both uniform and single tempo-changing conditions. The research from the lab of his advisor, Professor Riek, may one day enable older adults and people with physical and cognitive impairments to experience an improved quality of life with adaptable, easy-to-use robotic helpers.
The Ph.D. candidate believes that his research will help enable robots to recognize, anticipate and adapt to human groups, and will help robot makers to build more fluent and adaptable robots going forward, while providing a "necessary understanding for how we design future human-robot teams."
Iqbal designed a low-cost eye-tracking and gaze-estimation system for his M.S. thesis at the University of Texas at El Paso. Earlier he completed his undergraduate work in 2007 with a B.S. in computer science and engineering from the Bangladesh University of Engineering and Technology. He spent four years in the Ph.D. program at Notre Dame before transferring to UC San Diego in September 2016 to complete his doctorate under his longtime advisor, CSE Prof. Laurel Riek. Between Notre Dame and UC San Diego, Iqbal also did a Cognitive Robotics Internship at IBM's Watson Lab, where he devised ways for robots to detect human and hand gestures, and designed a neural network-based multimodal data fusion model to help a robot to make appropriate decisions during a conversation.